Insight 1
Enable users to swiftly identify robot types through clear and intuitive icons in a multi-robot collaboration.
1. Created low-fidelity wireframes to clear the design requirements.
Analyzed the key points and the transcripts to define the general user workflow. Then, I created a low-fidelity wireframe to clarify design requirements with the team and gathered the feedback on the design concepts.
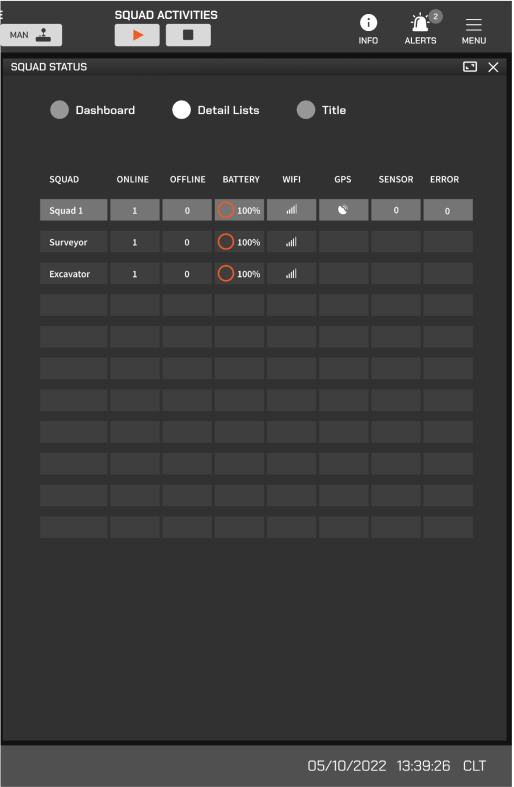
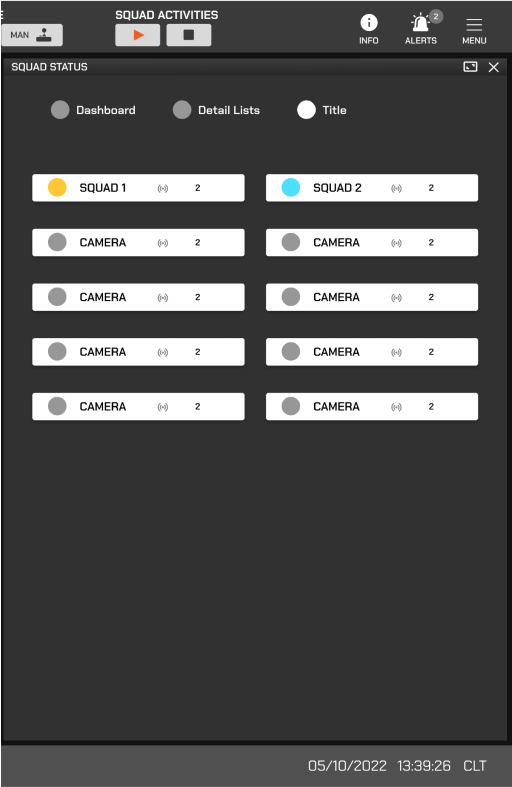
A low-fidelity prototype showcases the robot group status design and robots Icons design at a setup view.
Excavator icon
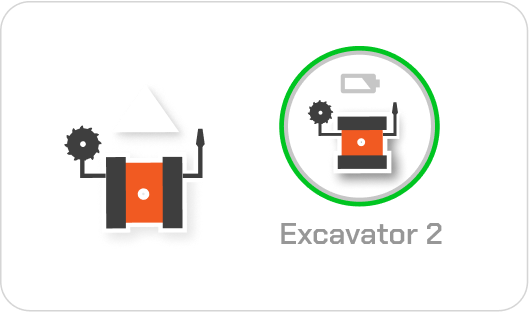
Excavator icon
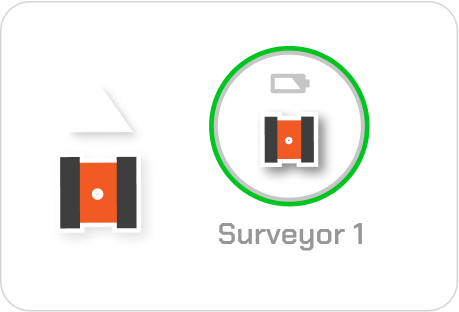
A low-fidelity prototype showcases the robot group status design and robots Icons design at a setup view.
1
Excavator icon
2
Excavator icon
3
Excavator icon
2. Analyzed feedback
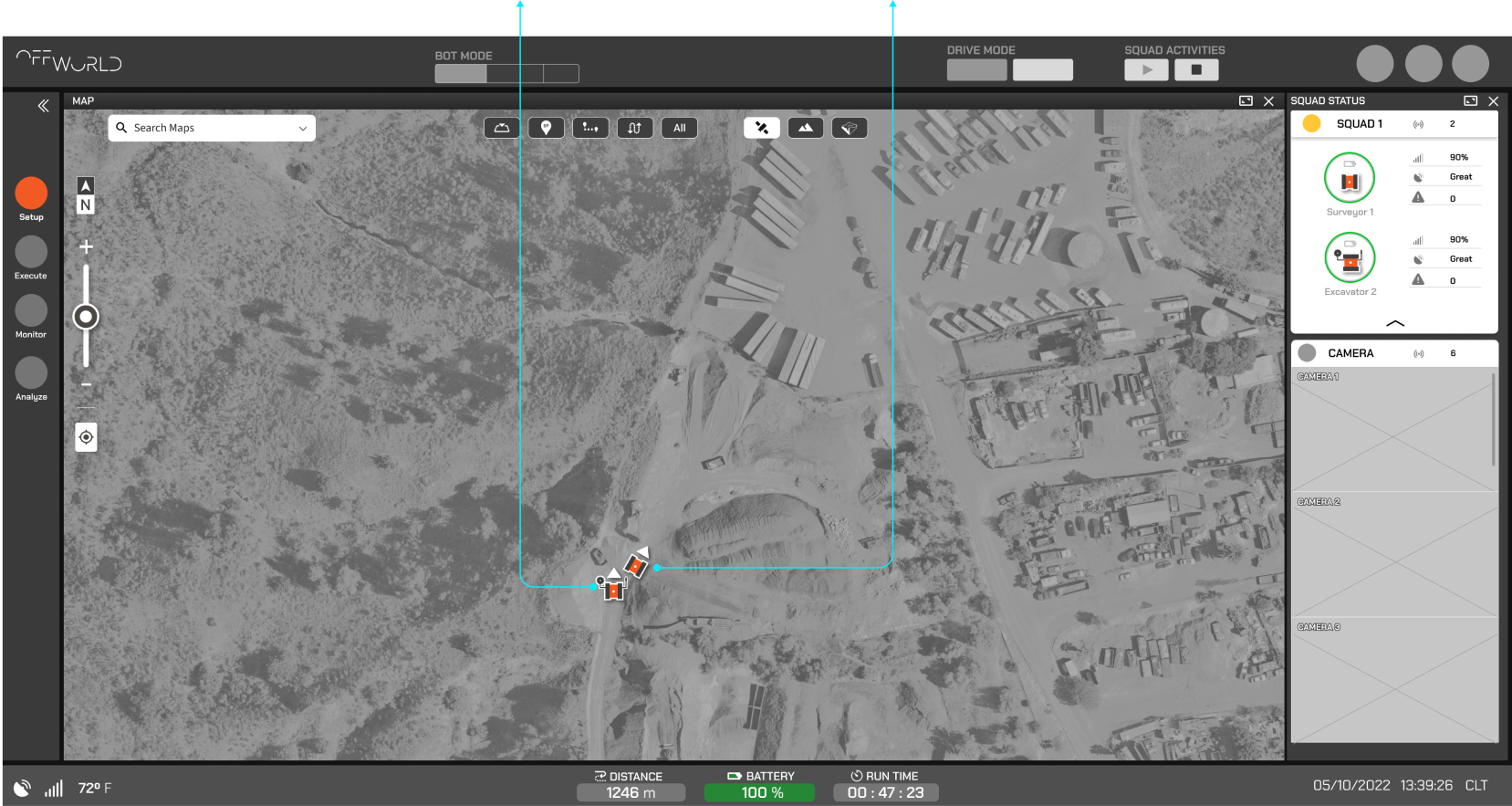
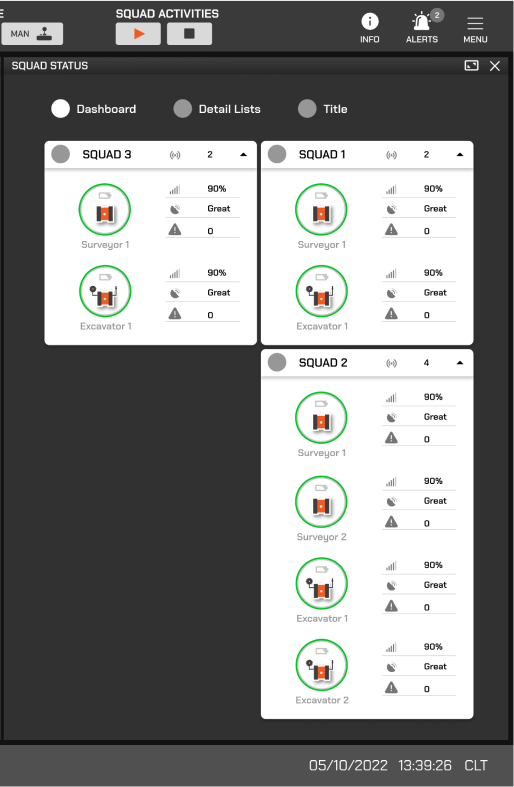
- Users should be able to recognize the robot icons on the map, displaying essential information such as names and numbers.
- Users should quickly receive notifications when a robot is disconnected or inactive.
- Users should have constant access to key KPIs at all times.
3. Defined the design strategies
- Distinguish robot icons using color codes, names, and numbers.
- Clearly highlight each robot's connection status.
- Display key KPIs for each robot continuously.



















































